Goodness of fit diagnostics for Markov Models
A set of simulation studies

Goodness of fit diagnostics for Markov Models
Plan for today
- Introduction to Markov Models
- Goodness of fit
- Why they are difficult for Markov Models
- Our simulation study
- Current / Future work
Markov Models
Markov Models
What are they
A Markov model is a statistical tool used to model systems that change over time and where the future depends only on the present.
Common examples include:
- Weather transitions
- Movement or behavioural states
- Progression of cognitive decline
- This is where my work is focused
Markov Models
What are they
- The model hinges on the Markov property:
- Let \(X_t\) denote an arbitrary state at time \(t\), where \(X_t \in S = \{1, 2, \dots, K\}\).
- Transition to state \(j\) at \(t + 1\) depends only on state \(i\) at \(t\).
Markov property
\[ P(X_{t+1} = j \; \vert \; X_t = i, X_{t-1} = i_{t-1}, \dots X_0 = i_0) = P(X_{t+1} = j \; \vert \; X_t = i) \]
Goodness of fit
Goodness of fit
Residual analysis
In ordinary regression settings, residuals measure the difference between what the model predicts and what we observe.
They are central for diagnosing:
- Misfit
- Non-linearity
- Outliers
Residuals typically rely on a clear “predicted value” for each observation.
Goodness of fit
Residual analysis
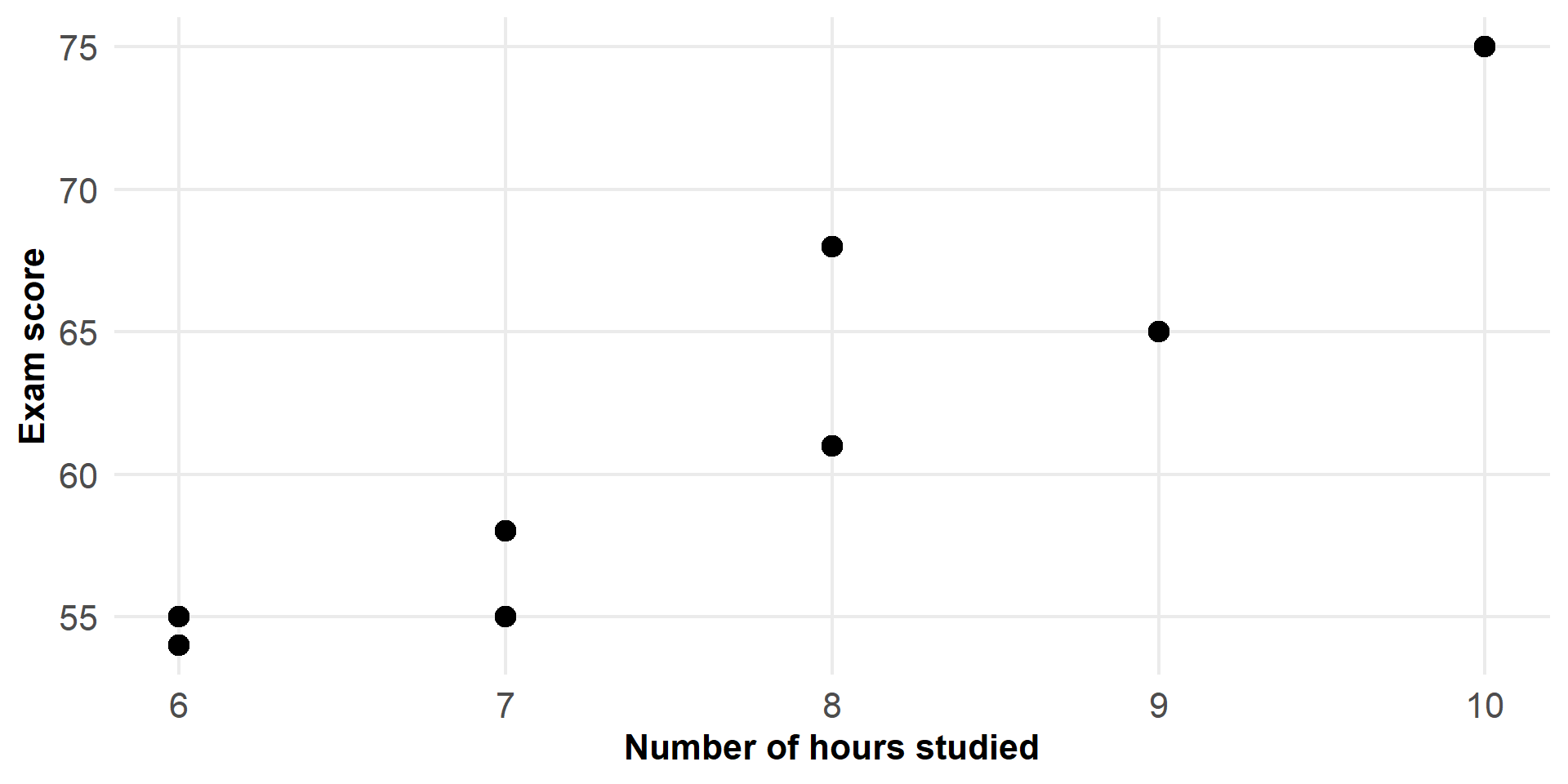
Figure 1: Observed data
Goodness of fit
Residual analysis
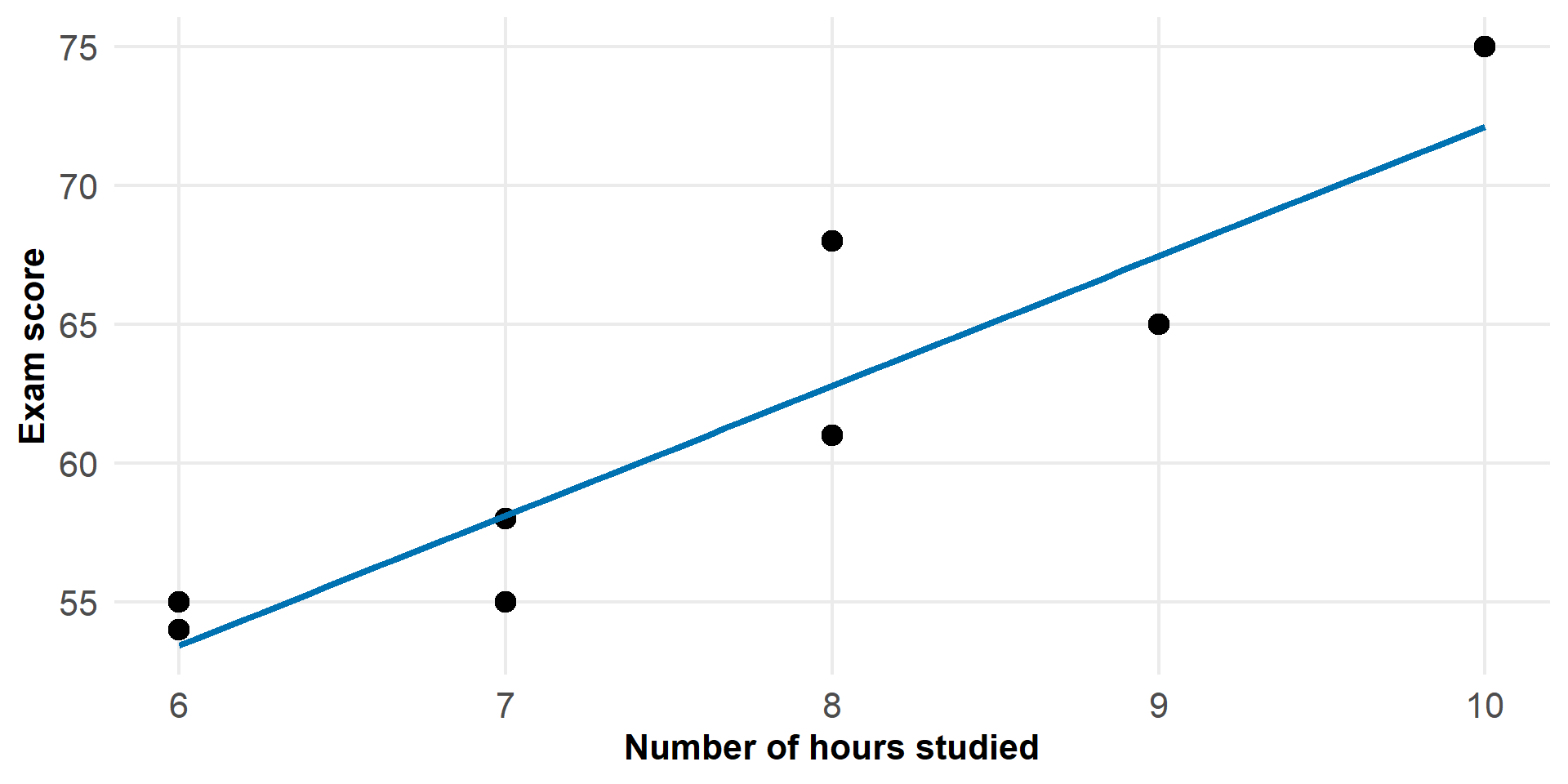
Figure 2: Observed data with fitted model
Goodness of fit
Residual analysis
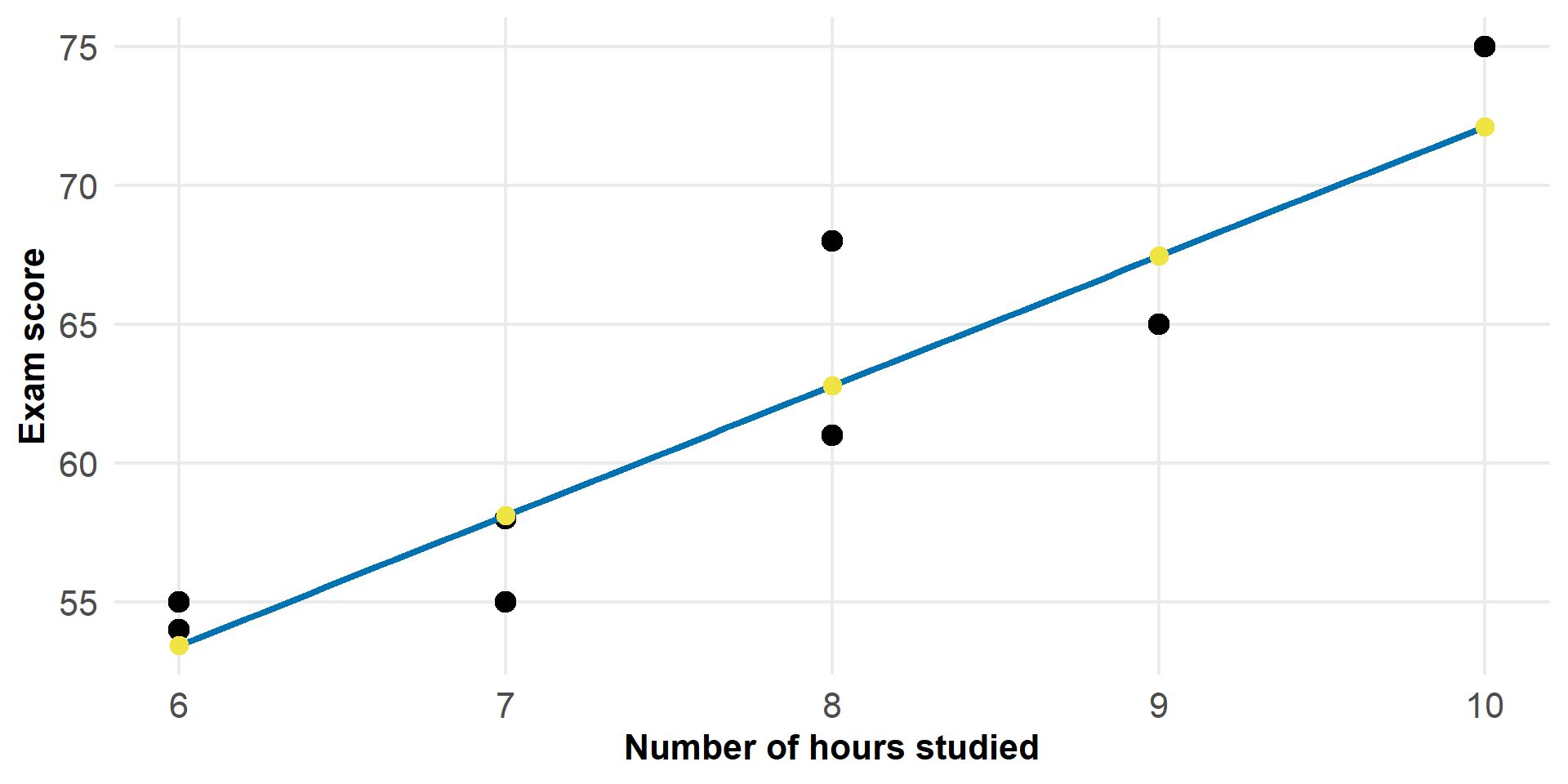
Figure 3: Observed data, fitted model, and predicted values
Goodness of fit
Residual analysis
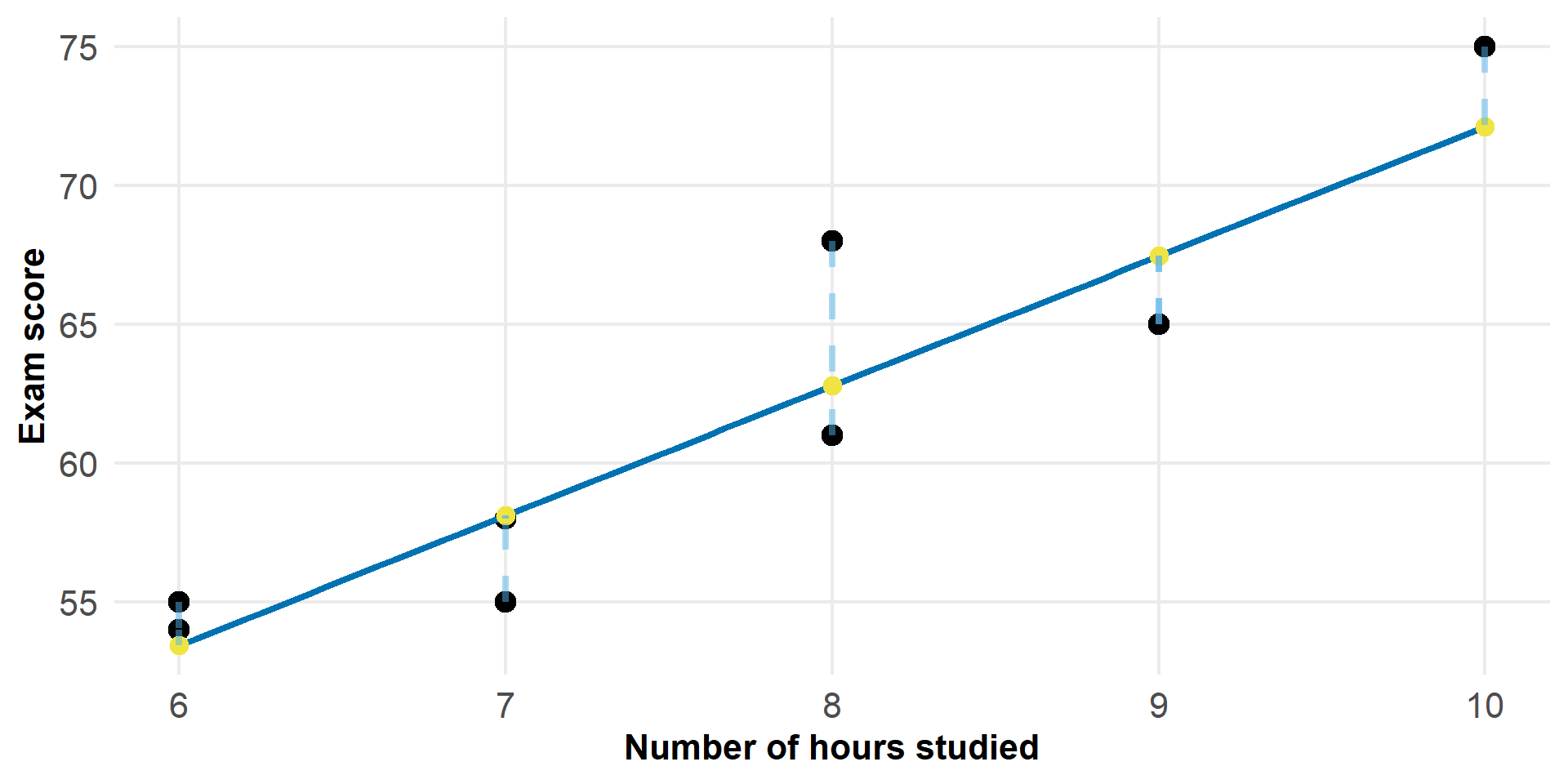
Figure 4: Residuals: distance between observed and fitted values
Goodness of fit
What about Markov Models
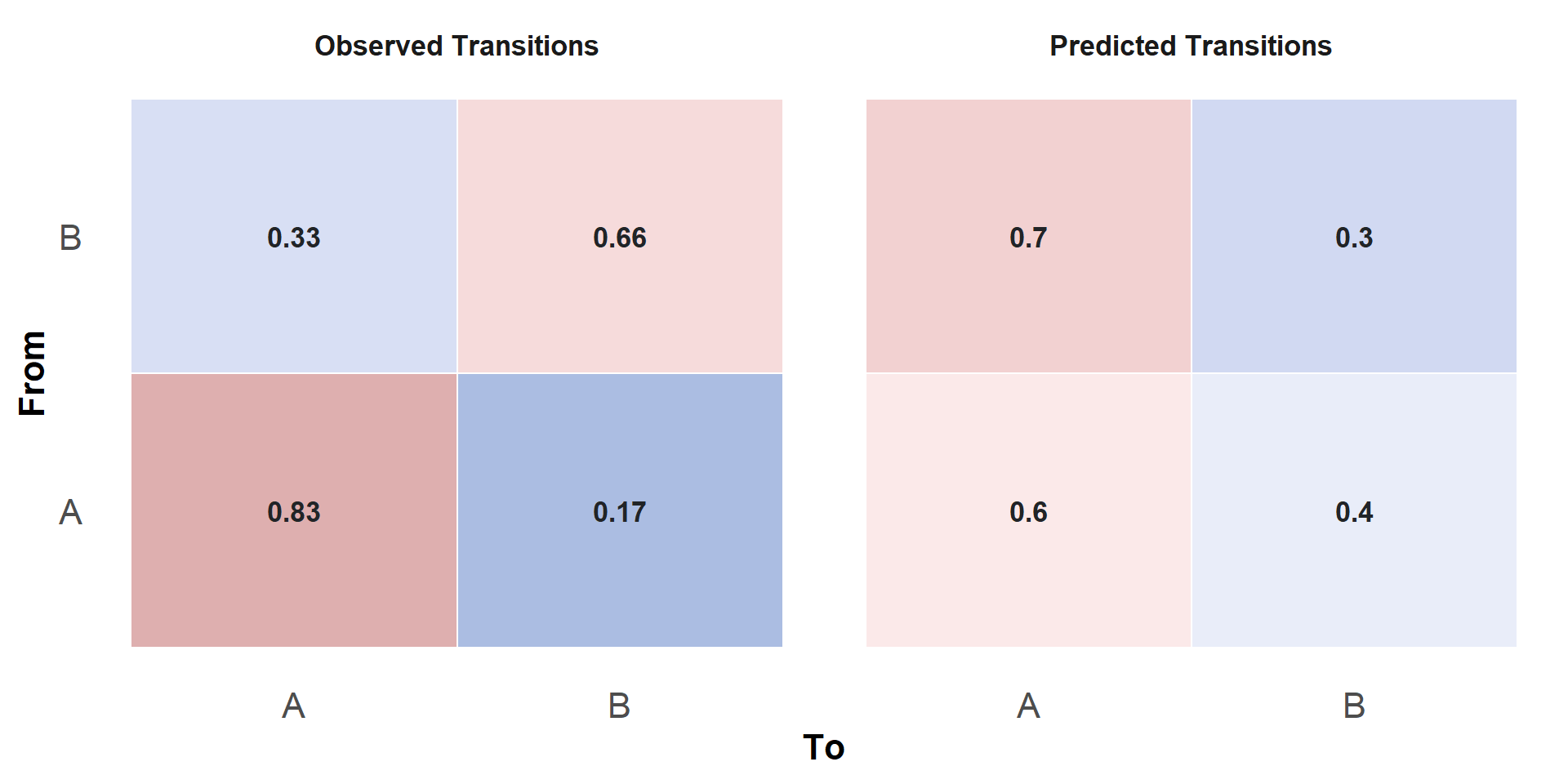
Markov Models dont deal with predicted values, but rather probabilities.
\[ P = \begin{bmatrix} P(A \rightarrow A) \quad P(A \rightarrow B) \\ P(B \rightarrow A) \quad P(B \rightarrow B) \end{bmatrix} = \begin{bmatrix} 0.6 \quad 0.4 \\ 0.7 \quad 0.3 \end{bmatrix} \]
For state A, the model predicts a probability vector:
\[ P(X_{t+1} \; \vert \; X_t = A) = (0.6, 0.4) \]
But in reality we observe one transition: \(A \rightarrow A \quad A \rightarrow B\)
A residual like \(y - \hat{y}\) no longer make any mathematical sense.
Simulation Study
Simulation Study
Transition matrices
Simulation Study
Simulation design
- Simulated \(N = 10{,}000\) individuals across \(t = 3\) waves.
- For each subject \(i\), time-invariant and initial time-varying covariates \((x_1 \dots x_5)\) were generated to mimic empirical datasets.
- \(y_{it}\) is a categorical state for individual \(i\) at wave \(t\), with three possible states \((1, 2, 3)\).
- Additionally, \(y_{it}\) followed 3 different scenarios.
Simulation Study
Simulation design
- Base models \(\rightarrow\) treats all observations independently.
- \(y \sim x_1 +x_2 + x_3\)
- Additive models \(\rightarrow\) includes previous state additively.
- \(y \sim x_1 +x_2 + x_3 + y_{t-1}\)
- Multiplicative models \(\rightarrow\) includes previous state multiplicatively.
- \(y \sim (x_1 +x_2 + x_3) \times t_{t-1}\)
Simulation Study
Simulation design
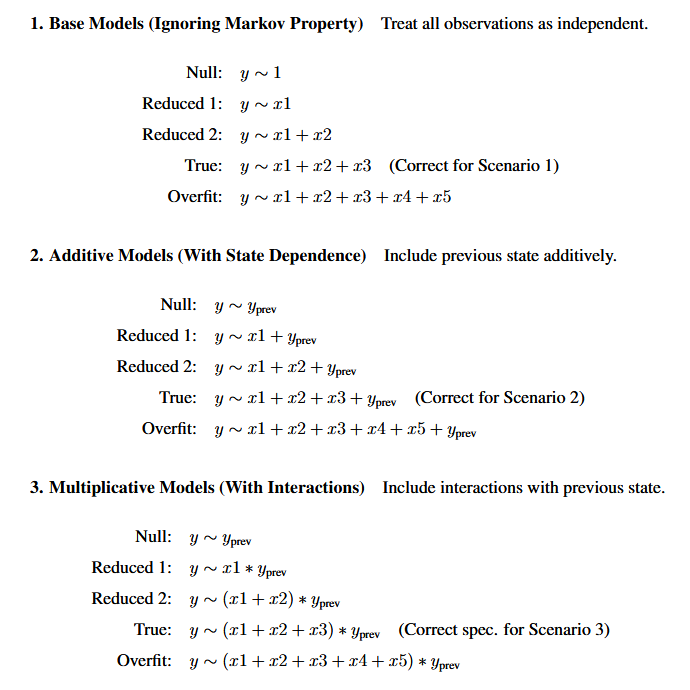
Figure 5: Simulation equations
Simulation Study
Simulation design
From each fitted model we compute an individual-specific predicted transition matrix:
\[\begin{equation} \hat{P} = \begin{bmatrix} P(y_t=1 | y_{t-1}=1) & P(y_t=2 | y_{t-1}=1) & P(y_t=3 | y_{t-1}=1) \\ P(y_t=1 | y_{t-1}=2) & P(y_t=2 | y_{t-1}=2) & P(y_t=3 | y_{t-1}=2) \\ P(y_t=1 | y_{t-1}=3) & P(y_t=2 | y_{t-1}=3) & P(y_t=3 | y_{t-1}=3) \\ \end{bmatrix} \end{equation}\]
We then compare \(P\) and \(\hat{P}\) via several distance metrics.
Simulation Study
Distance metrics
Frobenius Norm \(\rightarrow ||\mathbf{D}||_F = \sqrt{\sum_{j=1}^{n}\sum_{k=1}^{n} d_{j,k}^2}\)
Manhattan Distance \(\rightarrow ||\mathbf{d}||_1 = \sum_{i=1}^{n} |d_i|\)
Maximum Absolute Error \(\rightarrow \max(|d_i|)\)
Mean Absolute Error \(\rightarrow \frac{1}{n} ||\mathbf{d}||\)
Root Mean Squared Error \(\rightarrow \frac{1}{\sqrt{n}} ||\mathbf{D}||_F\)
Correlation Dissimilarity \(\rightarrow 1 - \rho(\text{vec}(\mathbf{P}), \text{vec}(\mathbf{\hat{P}}))\)
We also compare against AIC and BIC
Simulation Study
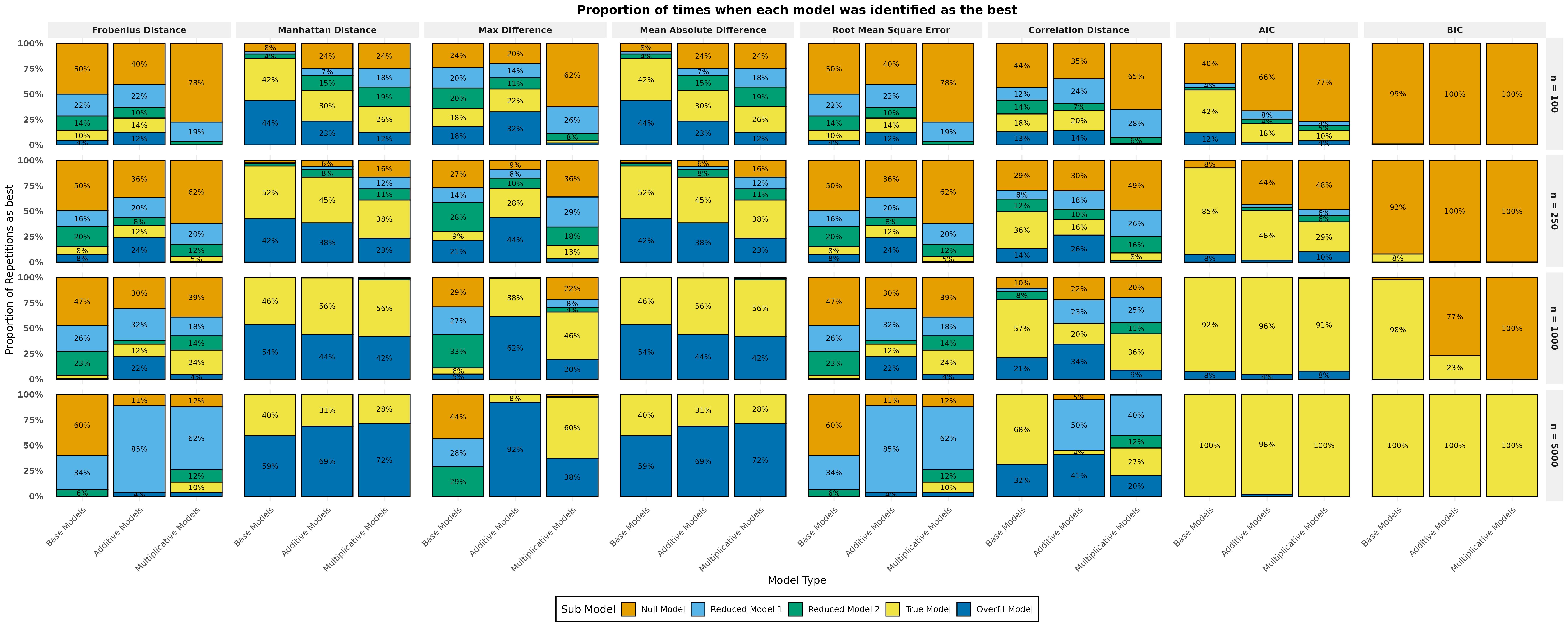
Results
Goodness of fit diagnostics for Markov Models
Conclusions
- For small sample sizes both Manhatten Distance and Mean Absolute Error perform equiviently, and sometimes better than standard measures as assertaining the true model.
- For large sample sizes AIC and BIC assertain the true model almost all the time.
We have developed goodness of fit metrics for small sample sizes
Goodness of fit diagnostics for Markov Models
Future work
- Testing different numbers of states (e.g., \(y_{it} \in S = \{1 \dots 5\}\))
- Simulating data with an absorbing state
\[\begin{equation} \hat{P} = \begin{bmatrix} P(y_t=1 | y_{t-1}=1) & P(y_t=2 | y_{t-1}=1) & P(y_t=3 | y_{t-1}=1) \\ P(y_t=1 | y_{t-1}=2) & P(y_t=2 | y_{t-1}=2) & P(y_t=3 | y_{t-1}=2) \\ P(y_t=1 | y_{t-1}=3) & P(y_t=2 | y_{t-1}=3) & P(y_t=3 | y_{t-1}=3) \\ 0 & 0 & 0 \end{bmatrix} \end{equation}\]
These slides were built with , , and Quarto